ROS2笔记
ROS2笔记
nodaoli1 | wget http://fishros.com/install -O fishros && . fishros |
概念
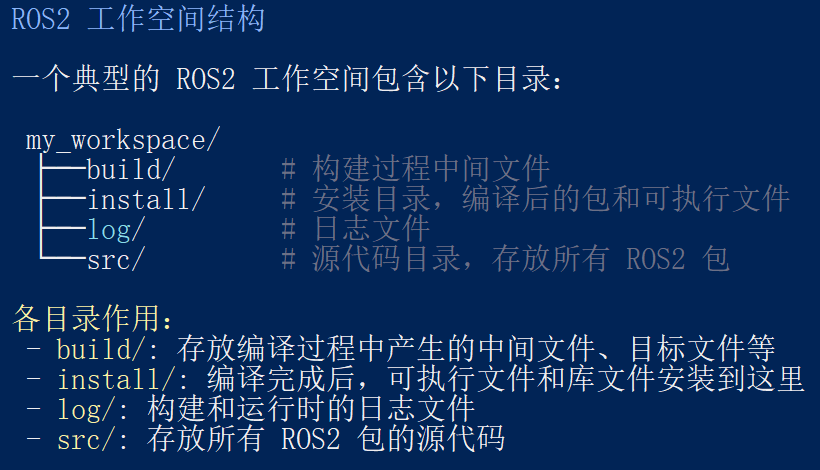
然后功能包就是放在src下面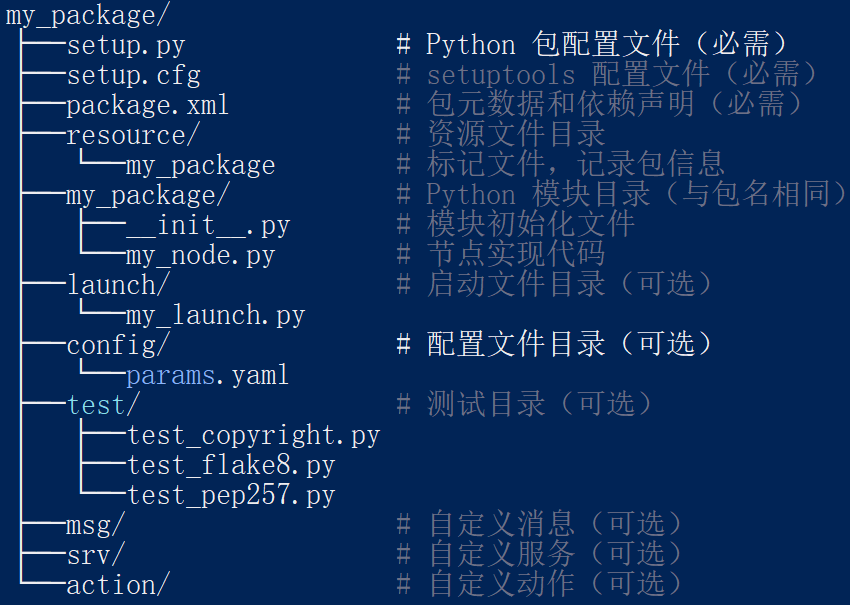
1 | 典型工作流程 |
创建一个Python功能包
1 | ros2 pkg create example_py --build-type ament_python --dependencies rclpy |
1 | ros2 pkg create <package_name> --build-type <build-type> --dependencies <dependencies> --node-name <node-name> |
常用命令
1 | 查看主题 |
rosdep 命令




评论
匿名评论隐私政策
✅ 你无需删除空行,直接评论以获取最佳展示效果